Inti dari pengendalian kelistrikan kendaraan listrik adalah pengendalian motor.Dalam tulisan ini, prinsip start star-delta yang umum digunakan di industri digunakan untuk mengoptimalkan pengendalian kendaraan listrik, sehingga sistem penggerak listrik 48V dapat menjadi bentuk utama tenaga penggerak motor 10-72KW.Performa seluruh kendaraan terjamin, dan pada saat yang sama, biaya penggerak listrik pada mobil kecil dan mobil mini sangat berkurang,

Dalam penelitian terbaru, saya menyadari bahwa kendali kendaraan listrik sebenarnya adalah kendali motor.Karena ilmu yang terkandung dalam artikel ini sangat luas dan rinci, jika prinsip dan proses optimalisasi skema kendali motorik dijelaskan secara lengkap dan rinci, sesuai dengan buku teks yang sedang dibaca penulis, poin-poin pengetahuannya cukup untuk menghasilkan monografi. dengan lebih dari 100 halaman dan lebih dari 100.000 kata.Agar pembaca di media mandiri dapat memahami dan menguasai metode optimasi tersebut dalam rentang ribuan kata.Artikel ini akan menggunakan contoh spesifik untuk menjelaskan proses optimasi skema motor kendaraan listrik.
Contoh yang dijelaskan di sini didasarkan pada Baojun E100, BAIC EC3, dan BYD E2.Hanya parameter berikut dari kedua model yang perlu dihubungkan, dan hanya kontrol motor yang dioptimalkan untuk mengoptimalkannya menjadi sistem baterai tegangan ganda 48V/144V DC, motor tegangan ganda AC 33V/99V dan satu set driver motor .Diantaranya, sistem elektronika daya penggerak motor merupakan kunci dari keseluruhan skema optimasi, dan penulis mempelajarinya secara cermat dan mendalam.
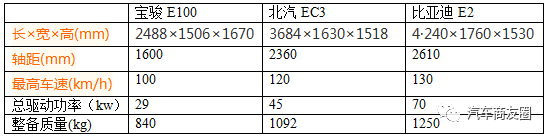
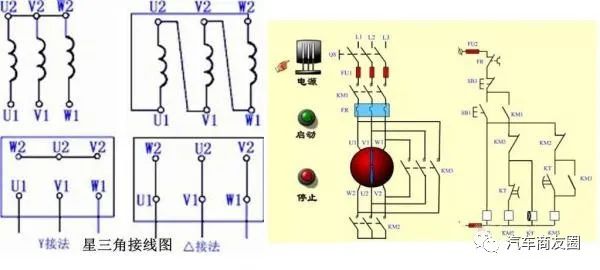
Dengan kata lain motor Baojun E100, BAIC EC3, dan BYD E2 hanya perlu dioptimalkan ke sistem kendali motor 29-70KW.Ini adalah perwakilan dari mobil mini A00, mobil kecil A0, dan mobil listrik murni kompak A.Artikel ini akan menggunakan metode kendali motor asinkron tiga fasa industri untuk menerapkannya pada kendali motor kendaraan listrik melalui kendali motor induksi asinkron tiga fasa star-delta, V/F+DTC.
Karena keterbatasan tempat, artikel ini tidak akan menjelaskan prinsip segitiga bintang dan sebagainya.Mari kita mulai dengan tenaga motor umum dalam kendali motor industri.Motor asinkron tiga fase 380V yang umum digunakan adalah 0,18~315KW, daya kecil adalah sambungan Y, daya sedang adalah sambungan, dan daya tinggi adalah motor 380/660V.Umumnya motor 660V adalah motor utama di atas 300KW.Bukan karena motor di atas 300KW tidak bisa menggunakan 380V, tapi keekonomiannya kurang baik.Arus inilah yang membatasi keekonomian motor dan rangkaian kendali.Biasanya 1 milimeter persegi dapat mengalirkan arus 6A.Setelah motor induksi asinkron tiga fasa dirancang, kabel belitan motornya ditentukan.Artinya, arus yang melewatinya ditentukan.Dari perspektif motor industri, 500A adalah nilai terbesar bagi keekonomiannya.
Kembali ke motor kendaraan listrik, tegangan tiga fasa PWM sistem baterai 48V adalah 33V.Jika arus ekonomis suatu motor industri adalah 500A, maka nilai ekonomis maksimum kendaraan listrik 48V adalah sekitar 27KW untuk motor induksi tiga fasa.Pada saat yang sama, mengingat karakteristik dinamis kendaraan, waktu untuk mencapai arus maksimum sangat singkat, biasanya tidak lebih dari beberapa menit, artinya 27KW dapat diubah menjadi kondisi kelebihan beban.Biasanya kondisi kelebihan beban 2 hingga 3 kali lipat dari kondisi normal.Artinya, kondisi kerja normal adalah 9 ~ 13.5KW.
Jika kita hanya melihat pencocokan level tegangan dan kapasitas arus.Sistem 48V hanya dapat berada dalam 30KW karena efisiensi berkendara adalah kondisi kerja terbaik.
Namun, ada banyak metode pengendalian untuk motor asinkron tiga fasa.Kendaraan listrik memiliki rentang pengaturan kecepatan yang luas (hampir 0-100%) dan rentang kendali torsi (hampir 0-100%).Dalam kondisi pengoperasian yang sulit, kendaraan listrik saat ini sebagian besar menggunakan kontrol VF atau DTC.Jika kontrol bintang-delta diterapkan, hal ini dapat menyebabkan efek yang tidak terduga.
Dalam kendali industri, tegangan kendali bintang-delta adalah 1,732 kali, yang merupakan suatu kebetulan dan bukan suatu prinsip.Sistem 48V tidak meningkatkan modulasi frekuensi PWM menjadi AC 33V, dan motor yang dirancang sesuai dengan level tegangan motor industri adalah 57V.Namun kami menyesuaikan level tegangan kontrol bintang-delta menjadi 3 kali, yang merupakan akar dari 9.Maka itu akan menjadi 99V.
Artinya, jika motor dirancang sebagai motor asinkron tiga fasa 99V AC dengan sambungan delta dan sambungan 33V Y, kecepatan motor dapat diatur dari 0 hingga 100% dalam kisaran daya 20 hingga 72KW dalam kondisi ekonomis. kondisi.Biasanya kecepatan maksimum motor adalah 12000RPM), pengaturan torsi 0-100%, dan modulasi frekuensi 0-400Hz.
Jika skema optimalisasi seperti itu bisa terwujud, maka mobil kelas A dan mobil mini bisa memperoleh performa bagus melalui satu motor.Kita tahu bahwa biaya sistem motor 48V (dalam nilai puncak 30KW) adalah sekitar 5.000 yuan.Biaya skema optimasi dalam makalah ini tidak diketahui, namun tidak menambah material, namun hanya mengubah metode kontrol dan memperkenalkan level tegangan ganda.Kenaikan biayanya juga terkendali.
Tentu akan banyak permasalahan baru dalam skema pengendalian seperti itu.Masalah terbesar adalah desain motor, desain pengemudi, dan persyaratan yang sangat tinggi untuk karakteristik pengisian dan pengosongan baterai tegangan tinggi.Masalah-masalah ini dapat dikendalikan dan sudah ada solusinya.Misalnya, desain motor dapat diselesaikan dengan mengatur rasio level tegangan tegangan tinggi dan rendah.Kita akan membahasnya bersama pada artikel berikutnya.
Waktu posting: 02-03-2023